[3줄 Control] 샘플링 대신 뉴럴넷
2021. 8. 18. 01:35ㆍAI Paper Review
<arxiv> https://arxiv.org/abs/1806.05767
Motion Planning Networks
Fast and efficient motion planning algorithms are crucial for many state-of-the-art robotics applications such as self-driving cars. Existing motion planning methods become ineffective as their computational complexity increases exponentially with the dime
arxiv.org
1. Path Planning 문제를 기존에 샘플링 베이스드 방법론으로 풀었다. 시간을 오래 들이면 더 좋은 해가 나오지만 실시간 제어에서는 그럴 수 없다.
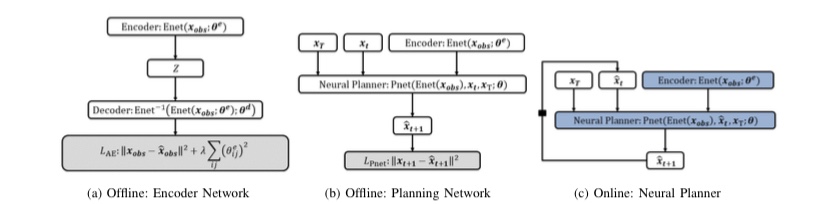
2. 그럼 샘플링으로 만든 거의 옵티말에 가까운 해를 뉴럴넷으로 학습하면 어떨까? 피쳐는 Point Cloud 같은걸로 주고 말이야.
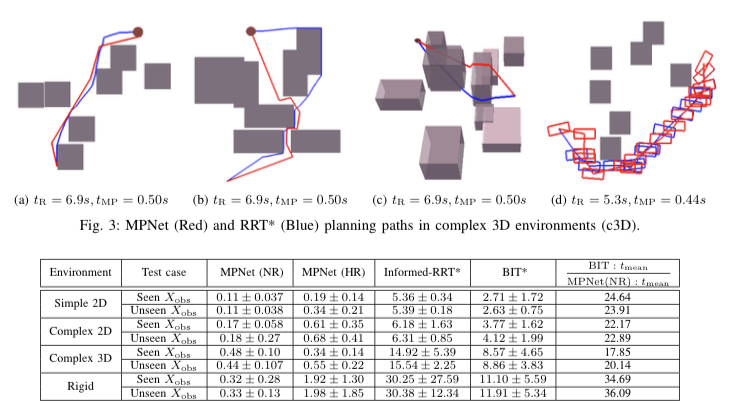
3. 같은 시간이면 기존 방법을 뛰어넘는구나! 리얼타임으로도 옵티말한 제어가 가능하게 되었다.
'AI Paper Review' 카테고리의 다른 글
| [3줄 IC] Image Captioning+Curiosity=BAAAM (0) | 2021.08.08 |
|---|---|
| [3줄 Vision] BERT+DOGE=BEIT (0) | 2021.07.22 |
| [3줄 Survey] RL for CO (0) | 2021.07.18 |
| [3줄 RL] 암호학과 강화학습의 조합 (0) | 2021.07.06 |
| [3줄 RL] 이미지로 LQR하기 (0) | 2021.07.04 |